
Research
General research interests: UAV, robotics, human-robot interaction/collaboration, control theory, reinforcement learning and digital twin.
 Offshore Wind Turbine Blade Monitoring Using Computer Vision and AI (In progress)
—
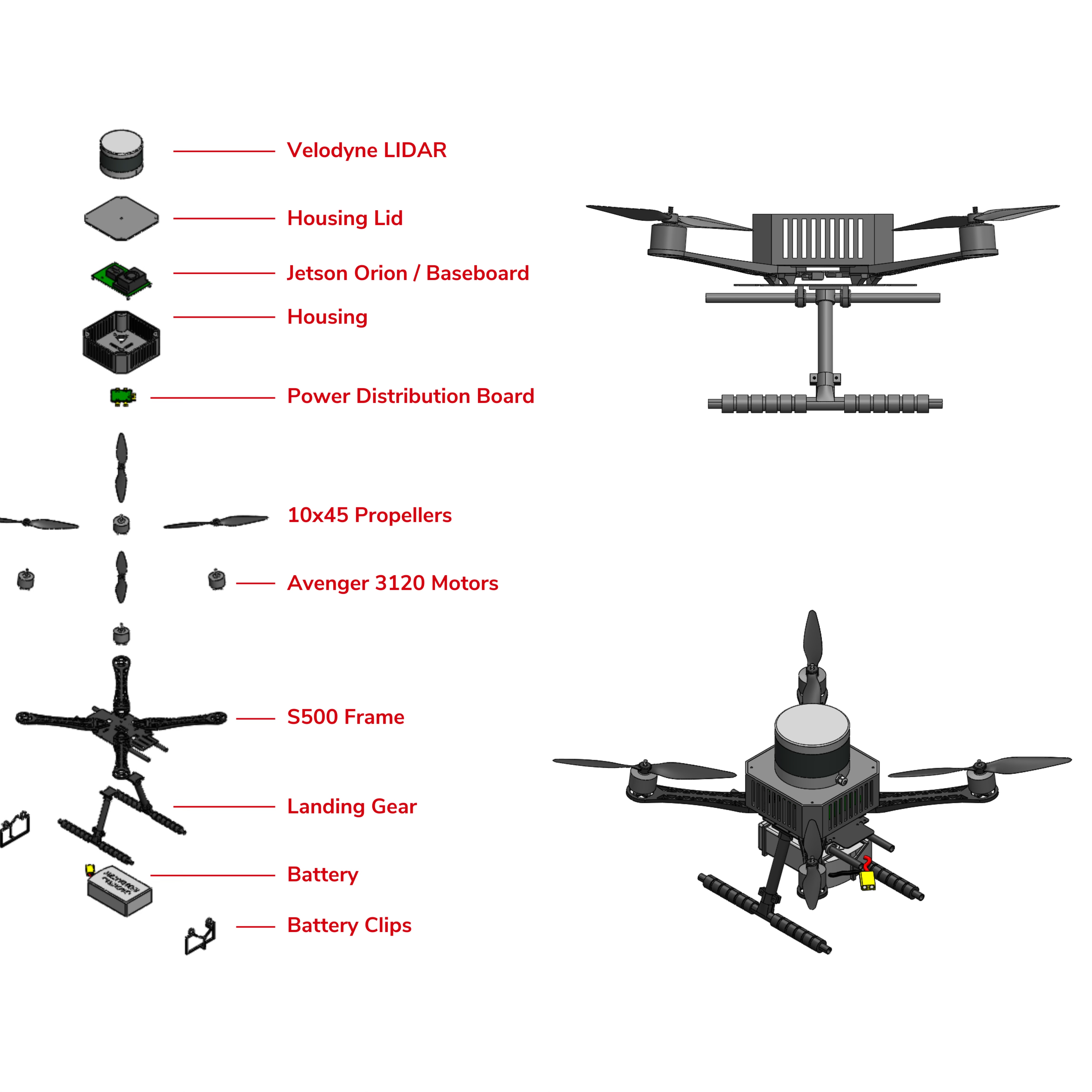
Traditional wind turbine inspections require skilled technicians to physically access turbine blades, which is time-consuming and labour-intensive. This project aims to develop a fully customised autonomous drone specifically designed for internal inspection and navigation within confined, low-light and GPS-denied environments - wind turbine blades. This drone will be equipped with multiple sensors and Jetson, enabling it to to perform SLAM and navigate autonomously.
Offshore Wind Turbine Blade Monitoring Using Computer Vision and AI (In progress)
—
Traditional wind turbine inspections require skilled technicians to physically access turbine blades, which is time-consuming and labour-intensive. This project aims to develop a fully customised autonomous drone specifically designed for internal inspection and navigation within confined, low-light and GPS-denied environments - wind turbine blades. This drone will be equipped with multiple sensors and Jetson, enabling it to to perform SLAM and navigate autonomously.
 Reinforcement Learning and Digital Twin-Driven Robot Obstacle Avoidance
—
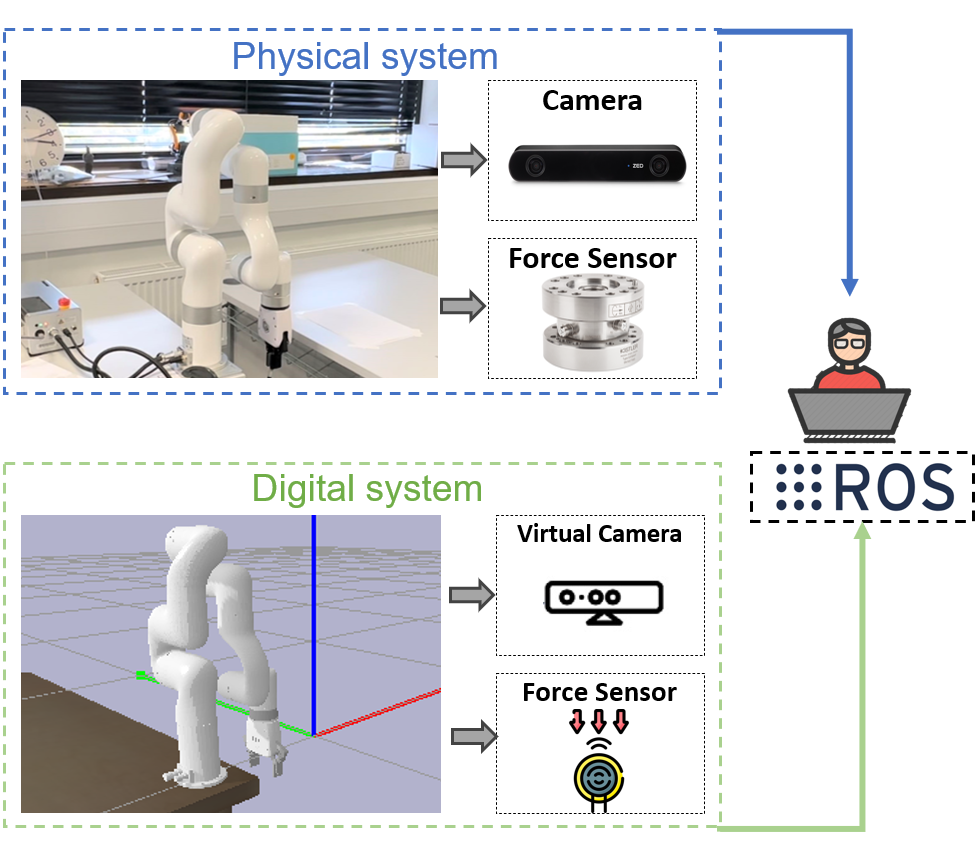
Robots are often required to be re-programmed when facing a more demanding task or even a few changes in workspace conditions. To increase efficiency and reduce human effort, this work explores the potential of using digital twins combined with RL to help robots adapt to new environments. Human demonstrations are integrated into the training process through a dual actor framework. Such a human-in-the-loop online training framework enables the robot to adjust to changes effciently.
Reinforcement Learning and Digital Twin-Driven Robot Obstacle Avoidance
—
Robots are often required to be re-programmed when facing a more demanding task or even a few changes in workspace conditions. To increase efficiency and reduce human effort, this work explores the potential of using digital twins combined with RL to help robots adapt to new environments. Human demonstrations are integrated into the training process through a dual actor framework. Such a human-in-the-loop online training framework enables the robot to adjust to changes effciently.
 Adaptive Admittance Control Based on Control Barrier Functions
—
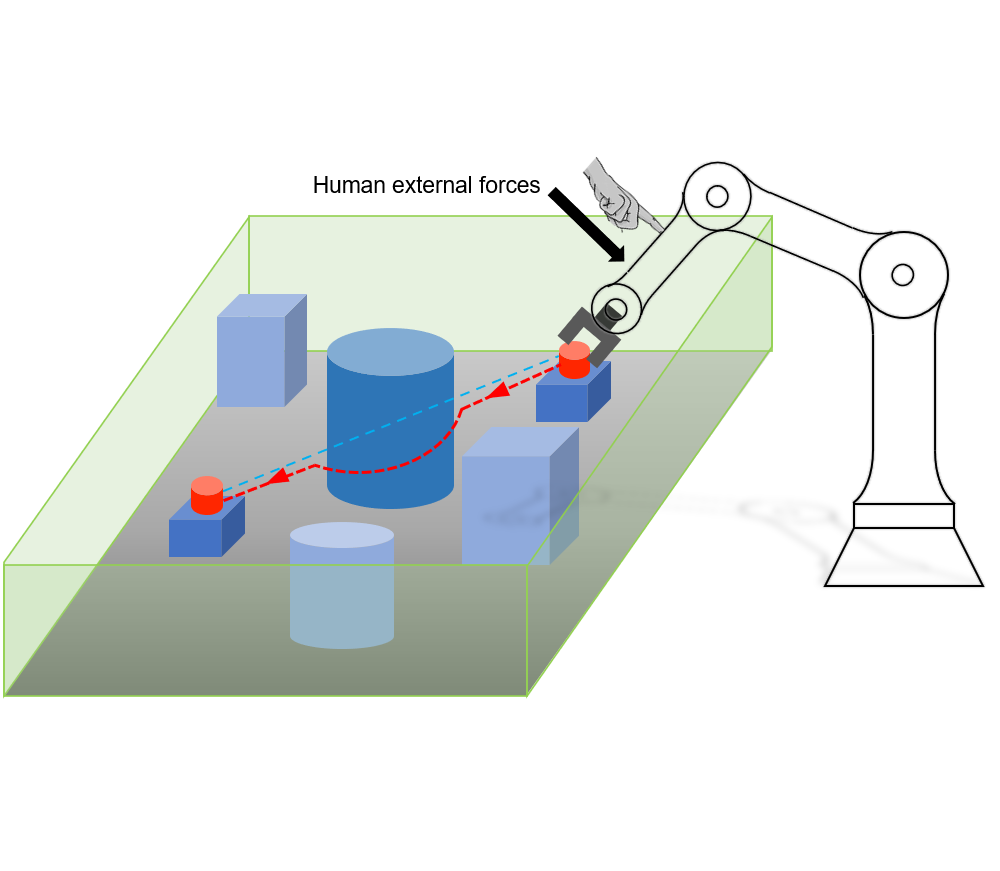
Physical human-robot collaboration requires strict safety guarantees, due to the fact that robots and humans work in a shared workspace. This work presents a novel control framework to handle safety-critical position-based constraints for human-robot physical interaction. The proposed methodology is based on admittance control and exponential control barrier functions to achieve compliance during the force interaction between human and robot, while simultaneously guaranteeing safety constraints.
Adaptive Admittance Control Based on Control Barrier Functions
—
Physical human-robot collaboration requires strict safety guarantees, due to the fact that robots and humans work in a shared workspace. This work presents a novel control framework to handle safety-critical position-based constraints for human-robot physical interaction. The proposed methodology is based on admittance control and exponential control barrier functions to achieve compliance during the force interaction between human and robot, while simultaneously guaranteeing safety constraints.
 Human-Centered Pedestrian Avoidance System for Autonomous Vehicles
—
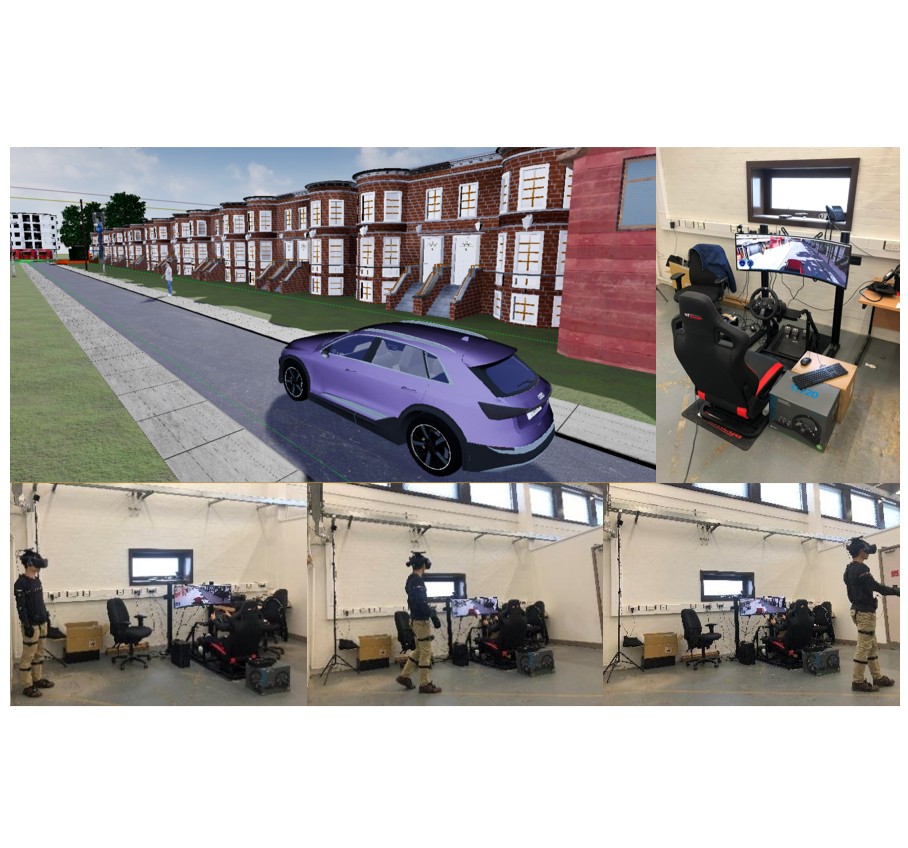
This study proposes a 3D Virtual Reality (VR) framework for studying how pedestrians interact with human-driven vehicles and autonomous vehicles. The framework uses VR technology to collect data in a safe and cost-effective way, and deep learning methods are used to predict pedestrian trajectories. Graph neural networks have been used to model pedestrian future trajectories and probability of crossing the road.
Human-Centered Pedestrian Avoidance System for Autonomous Vehicles
—
This study proposes a 3D Virtual Reality (VR) framework for studying how pedestrians interact with human-driven vehicles and autonomous vehicles. The framework uses VR technology to collect data in a safe and cost-effective way, and deep learning methods are used to predict pedestrian trajectories. Graph neural networks have been used to model pedestrian future trajectories and probability of crossing the road.
 Fixed-time Integral Sliding Mode Control for Physical Human-Robot Collaboration
—
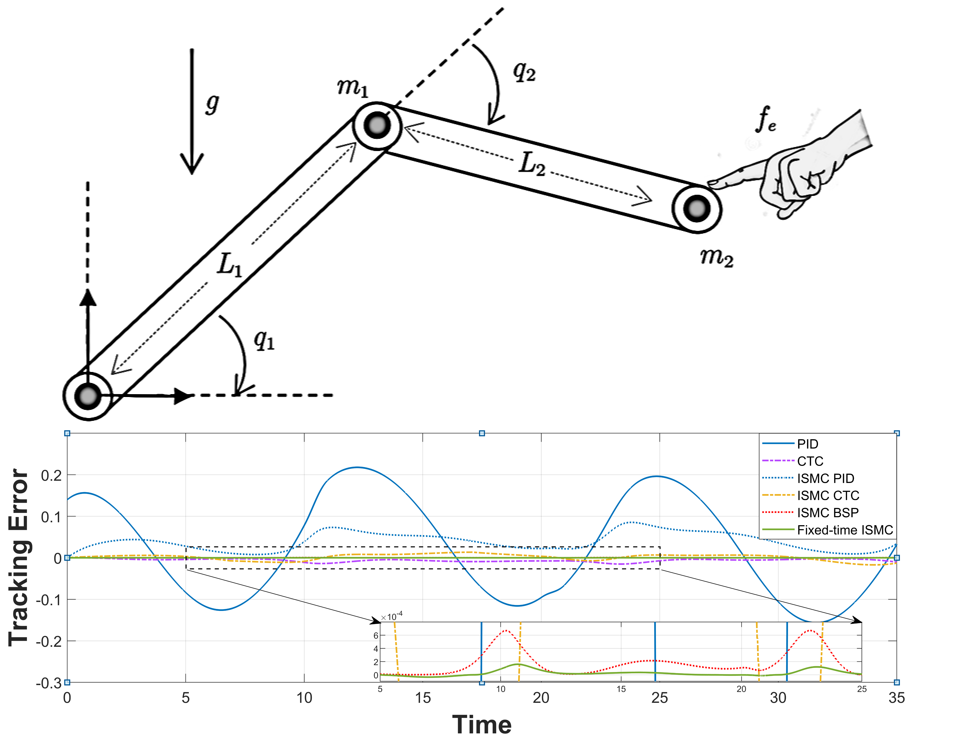
This work proposes a novel fixed-time integral sliding mode control for admittance control to enhance physical human-robot collaboration. The proposed method combines the benefits of compliance to external forces of admittance control and high robustness to uncertainties of integral sliding mode control (ISMC), such that the system can collaborate with a human partner in an uncertain environment effectively.
Fixed-time Integral Sliding Mode Control for Physical Human-Robot Collaboration
—
This work proposes a novel fixed-time integral sliding mode control for admittance control to enhance physical human-robot collaboration. The proposed method combines the benefits of compliance to external forces of admittance control and high robustness to uncertainties of integral sliding mode control (ISMC), such that the system can collaborate with a human partner in an uncertain environment effectively.